Aircraft Spruce & Specialty Co.


- Photo may represent series and not specific product
- SHARE





MGL SP-6 Magnetometer
MFR Model# SP-6
 FREE Shipping
FREE Shipping
Overview
|
The SP-6 magnetometer is a three axis, tilt compensated electronic compass system. It outputs magnetic heading information. In the case of a standalone SP-6, tilt compensation is performed by deriving the attitude of the SP-6 sensor using on-board accelerometers which are used to vector the direction of gravity. The magnetic field is measured using three magnetometers which are mounted perpendicular to each other resulting in three magnetic force vectors. Using three magnetic force vectors and knowledge of attitude allows calculation of magnetic heading even if the SP-6 is not horizontal. if you have a SP-7 AHRS connected to the same Airtalk bus as the SP-6, the SP-6 will use the attitude data from the SP-7 to calculate the heading. If your SP-6 is set to gyro mode and horizon data is being received, your SP-6 will use the gyro derived horizon rather than the built in accelerometers for tilt compensation. In this case, heading is correct even during turns. |
WARNING: Cancer and Reproductive Harm - www.P65Warnings.ca.gov. |
Specifications
- Weight:
Excluding cables: 126 grams
Including cables: 175 grams (RCA signal and DB9 power cable included) - Electrical and Temperature Characteristics:
Input voltage range: 8V to 20V DC regulated preferred for maximum performance.
11-14V is suggested as operating voltage.
Current consumption: 50 mA (heater off) at 13.8VDC input voltage
120 mA (heater on) at 13.8VDC input voltage
Temperature Regulation: 35ºC (internally maintained temperature) - Accelerometer Specifications
Accelerometers: MEMS
Sensor Limits: +/- 8G
Maximum G-force loading: 30G (any axis) - Output Messages
Interface: MGL Avionics Airtalk compatible
Normal output message: 50 ms (average) latency
Raw output message: 12 ms (average) latency - Magnetic sensors
Sensor type: Magnetoresistive, three axis
Measurement headroom: 3:1 based on field strength at magnetic equator
Accuracy: +/-1.5º typical, sensor horizontal, clean field
Tilt compensation: Accelerometers or external gyro derived horizon
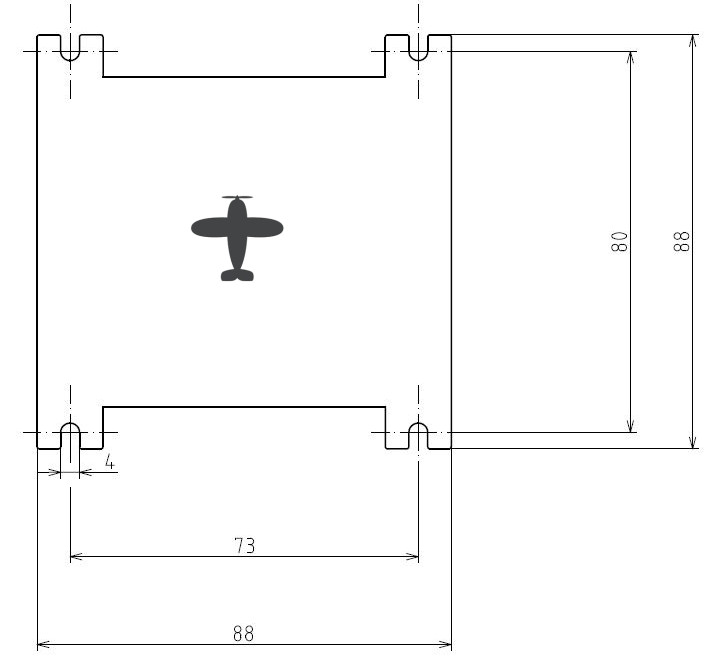
Drawing
Documents
























Reviews
Works well for me after I found the whole airframe (steel cage) got magnetized during a shipping container transport. The SP-6 sensor is placed in the outer wing and it is more precise than any conventional compass I had before.
MGL Sp-6 Magnetometer Sensor
Q&A
Please note, Aircraft Spruce ®'s personnel are not certified aircraft mechanics and can only provide general support and ideas, which should not be relied upon or implemented in lieu of consulting an A&P or other qualified technician. Aircraft Spruce ® assumes no responsibility or liability for any issue or problem which may arise from any repair, modification or other work done from this knowledge base. Any product eligibility information provided here is based on general application guides and we recommend always referring to your specific aircraft parts manual, the parts manufacturer or consulting with a qualified mechanic.
Per the manual, the SP-6 outputs magnetic heading information. Attitude data would come from an SP-7.
We have added the dimensional drawing to the webpage. Please review it there.
This unit will provide rate of turn and magnetic heading.
This is a remote magnetometer used for DG/HSI for heading.
Yes, when you add on the SP-6 it will allow for the Compass with slip indicator to function.
No, this is only used for compatible MGL instruments. The AV-30 is a non-slaved DG, so it does not require a remote magnetometer.
You would have to extend the wires.